SR110 Build and Flash with VS Code
This document provides concise, VS Code-only steps to build, convert images, flash, and debug SR110 applications. For common extension features (installation, tools, SDK import, logging, memory analysis), see Astra MCU SDK VS Code Extension User Guide.
Throughout this guide, <sdk-root> refers to the directory where you extracted or cloned the SDK.
Table of Contents
Prerequisites
Astra Machina Micro connected per the SR110 Platform Guide.
VS Code extension and tools installed. See Setup and Install SDK using VS Code.
Build and Deploy Flow
The Build and Deploy view allows running each step one at a time or sequentially.
If you check Build Configurations, Image Conversion, and Image Flashing, all three operations run sequentially. Each step automatically fills in required information for the next step, such as the .elf/.axf file or .bin file.
You may also run each step one at a time if desired.
The steps do not run until the Run button at the bottom of the view is pressed.
Environment Setup
Import the SDK root and set workspace
SRSDK_DIRto<sdk-root>via the Import SDK view.Import the project you want to build via the Import Project view.
Open Build and Deploy from the Imported Projects view and set
Device->SR110.If multiple projects are imported, select the correct project in the Build and Deploy project dropdown.
Build Configurations (SR110)
Purpose: Generate .elf/.axf for SR110 firmware (cm55).
Steps:
Check the Build Configurations checkbox.
If multiple projects are imported, select the correct project in the Build and Deploy project dropdown.
Select the desired Build Configuration:
Release for flashing
Debug for GDB debugging
Select the target Board and Board Revision.
Board Revision is printed on the bottom of Astra Machina Micro.
Choose the desired Compiler and Build Toolchain.
Select the application from the Application dropdown.
Choose the appropriate build option:
Option |
What it does |
When to use it |
|---|---|---|
SDK Build (default_package) |
Generates the shared SDK foundation in |
Use this first to prepare the common SDK package required by project builds. |
Build (SDK+Project) |
Builds the SDK components required by the app based on the app configuration, installs them into the app-local install folder, and then builds the example using that generated install package. |
Use this when building an app for the first time and the required SDK components have not yet been generated for that app. |
Build (Project) |
Builds the active SR110 project using project-local artifacts. |
Use this during normal development when you want a fresh build for the selected project. |
Build (Use Pre-built SDK) |
Builds the active SR110 project against the common install root in |
Use this to reuse an existing SDK package and avoid rebuilding shared components. |
Notes:
If Build Configurations is disabled, verify that
SRSDK_DIRis set correctly through the Import SDK view.
Result:
Build outputs are generated under the project’s
out/sr110_<Build_Type>/<Build_Mode>/directory.Example output:
out/sr110_cm55_fw/release/sr110_cm55_fw.elfThe executable extension depends on the selected compiler:
.elffor GCC/LLVM and.axffor AC6.
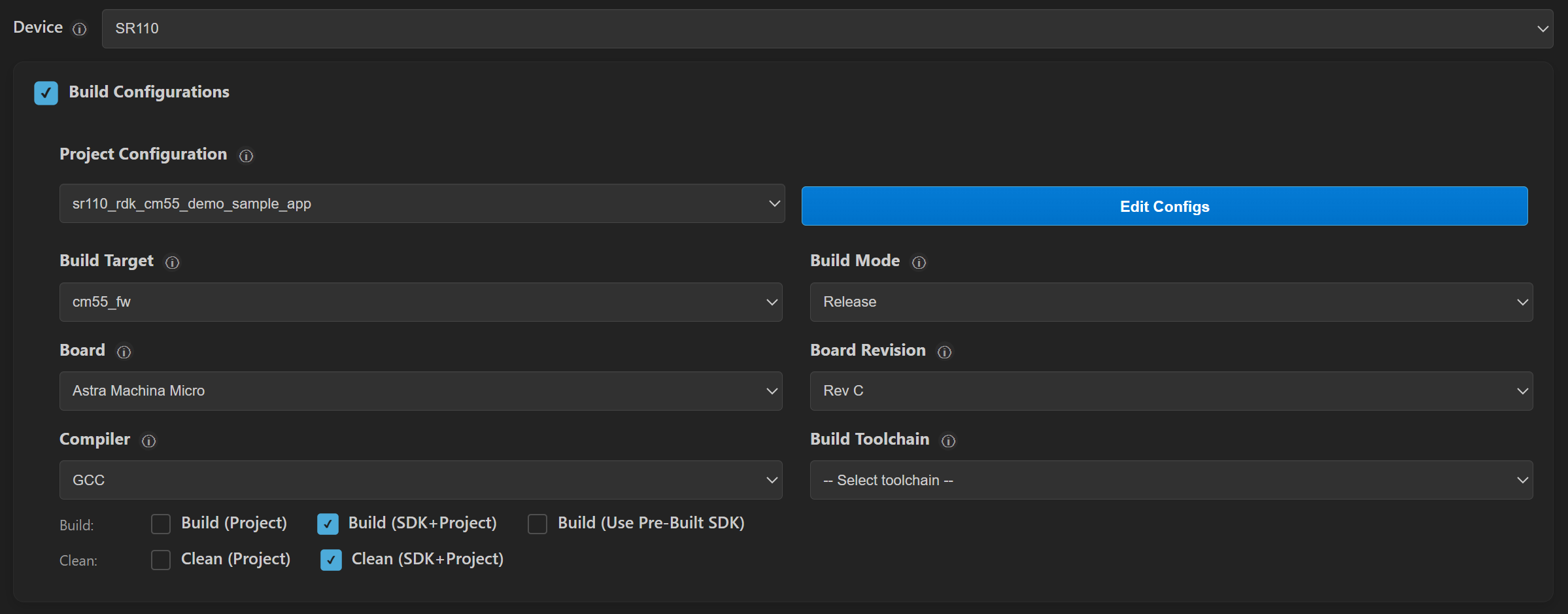
Image Conversion (SR110)
Purpose: Convert .axf/.elf outputs into flashable .bin images.
Steps (basic):
Check the Image Conversion checkbox.
The built .elf/.axf path is auto-populated after the build completes.
Select Flash Image
Select Secured
For flash images, choose Flash Type (default
GD25LE128) and Flash Frequency (default67).Click Run to convert.
Optional (advanced):
Convert a model bin when needed by selecting the model file and its security setting.
Result:
Converted binaries are written under
out/bin_files/Output/B0_Flash/B0_flash_full_image_GD25LE128_67Mhz_secured.bin
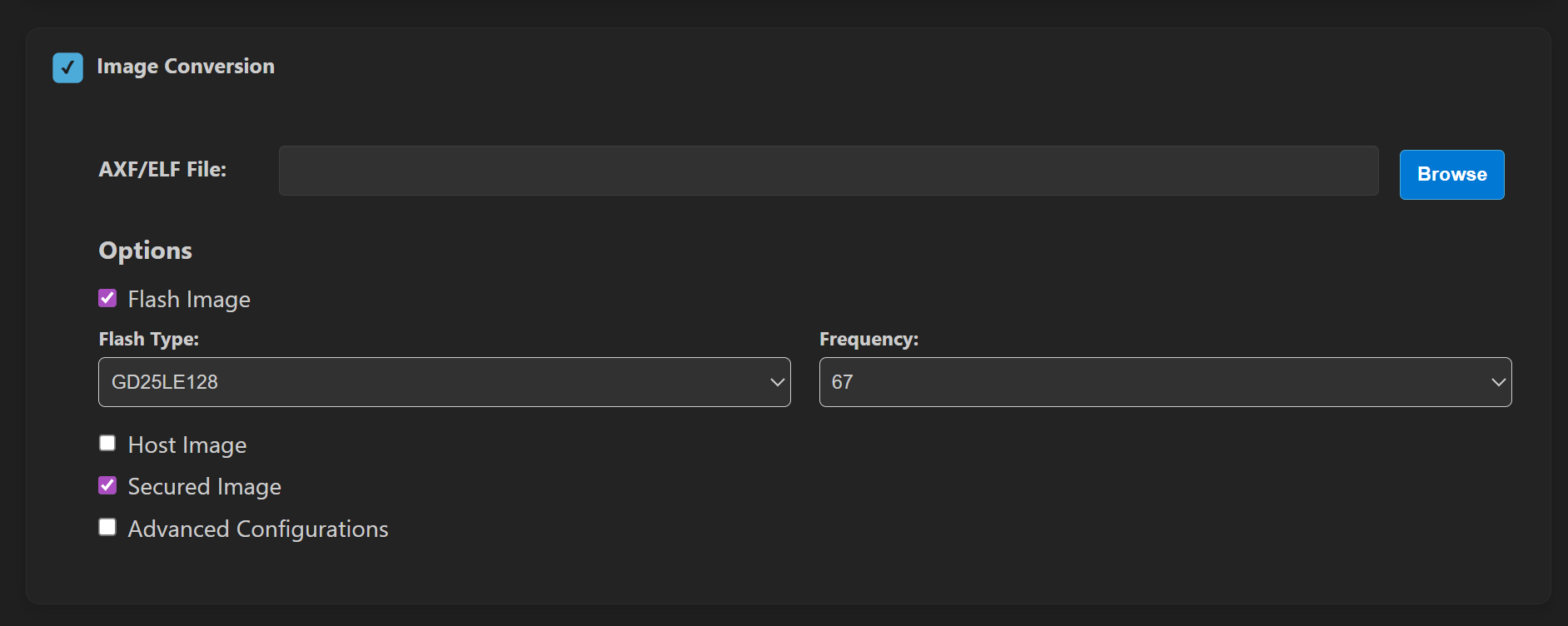
Image Flashing (SR110)
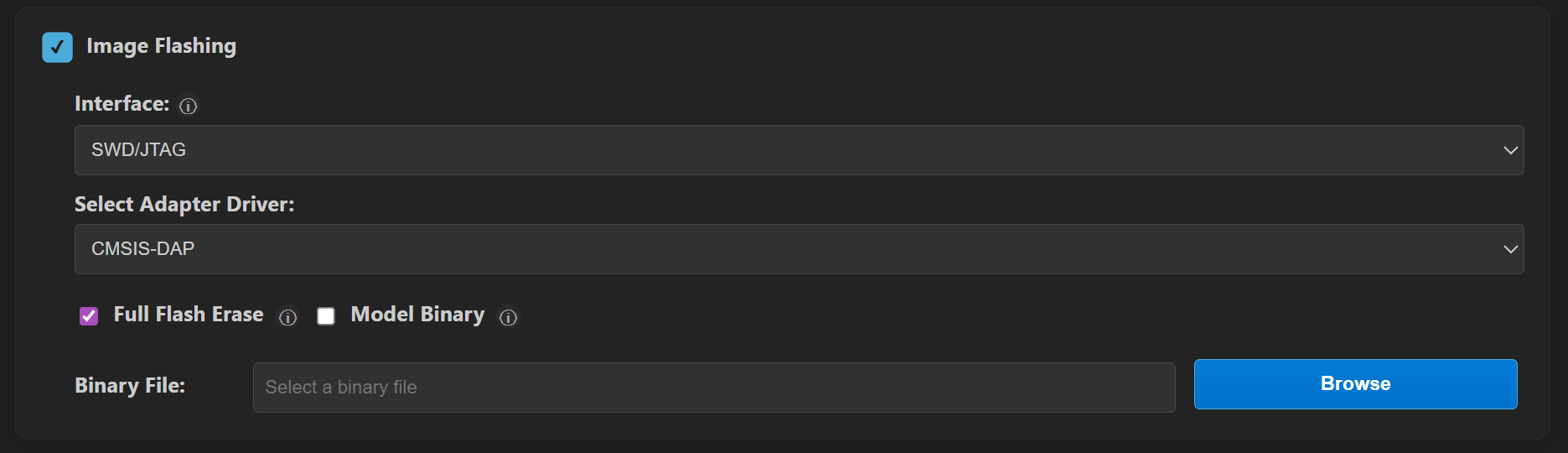
Check the Image Flashing checkbox.
If you are running WSL, please consult the Astra MCU SDK - WSL User Guide to ensure USB ports are properly handled.
Interface
There are three methods to update the flash connected to the SR110 on the Astra Machina Micro development kit.
SWD/JTAG (recommended for first use)
The Debug IC on the Astra Machina Micro is a CMSIS-DAP device. There is an SWD connection between the Debug IC and the SR110 on the Astra Machina Micro. The CMSIS-DAP device translates USB commands on J14 to SWD commands. Via SWD the external flash can be programmed.
Steps:
Ensure only J14 is connected
Open Image Flashing and select Interface →
SWD/JTAG.Select Select Adapter Driver →
CMSIS-DAP(onboard Debug IC) orJ-Link.Enable Full Flash Erase if you need a clean flash.
Confirm the auto-populated Binary File or browse to a
.bin.Click Run to flash.
Model binaries (vision examples):
If your application includes a model .bin, flash it using the Model Binary option and the offset specified by the example README (often 0x629000 for VGA use cases)
FW mode (UART/CDC)
This is the device firmware update (DFU) mechanism. For this method to work an image with the Host API and FW Update enabled must be running on the SR110. By default the communication protocol is USB CDC. This USB CDC enumerates on J13 of the Astra Machina Micro.
Plug J13 into the Astra Machina Micro and press reset.
Open Image Flashing and select Interface →
FW Update (Application Chip).Connect to the enumerated CDC Port.
Set Select Command to
Burn File to Flash.After flashing completes reset the SR110.
Note: For FW update, ensure only J13 is plugged in during the update process.
ROM
The SR110 has a ROM boot mechanism. To enable ROM boot the boot strap must be set properly.
On the Astra Machina Micro set SW1.2 in the “on” position, closer to the “KE” text on the switch.
After setting the boot strap reset the SR110.
Open Image Flashing and select Interface →
ROM.Connect an external USB to UART converter to J28.
Select the COM Port: that matches your external USB to UART converter.
After flashing is complete put SW1.2 back to off position and reset the SR110 to allow the code to run from external flash.
Advanced options
FW Update (Debug IC): This only needs to be run the first time you recieve the Astra Machina Micro or if the SDK ships with a new version.
In Advanced Options, select FW Update (Debug IC).
Choose the Debug IC COM port and select
tools/Debug_IC_FW/Debug_IC_FW.binClick Run, then unplug/replug the USB cable when finished.
Note: When updating Debug IC FW, ensure only J14 USB is plugged in.
Debugging (SR110)
Steps:
Build with Debug
Check the Debug Options and confirm the AXF/ELF path.
Select Adapter driver (
CMSIS-DAPorJ-Link) and keep Use default config file (or choose Provide custom config file to browse to a config).Choose Mode:
Download and Reset Program (typical)
Attach to Running Program
Attach and Halt Program
Click Run to start the debugger.
Running Examples
After flashing, reset the board and follow the example README for runtime instructions.
USB CDC Image Streaming (Windows)
Some vision examples stream image data over USB CDC. On Windows, install the correct driver for the streaming port. These steps will only work once a Vision example has been flashed onto the SR110. After flashing the vison example into the SR110 ensure both J14 and J13 USB are plugged in and reset the board.
Hardware setup:
Connect J13 for streaming
Keep J14 connected for power and console
Driver setup (Zadig):
Download Zadig from https://zadig.akeo.ie/.
Run
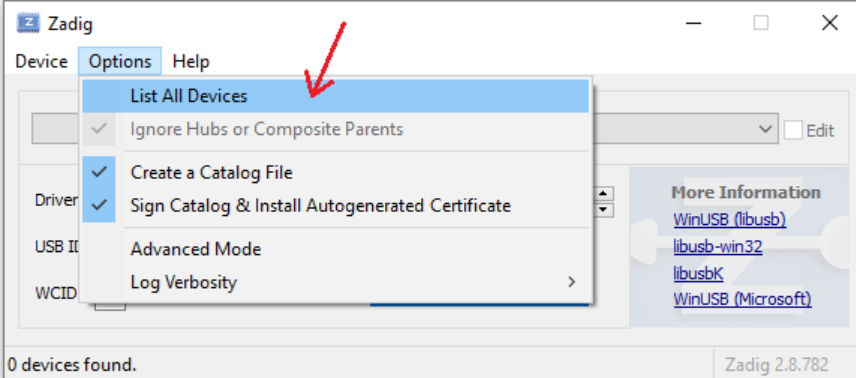
zadig-2.8.exe.From Options, select List All Devices.
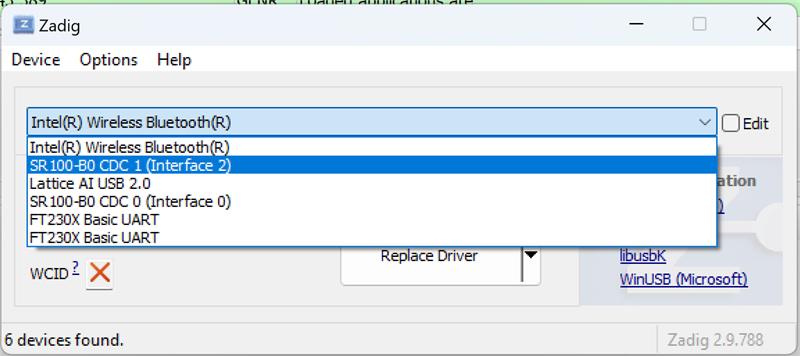
In the device dropdown, select SR 100-B0 CDC 1.
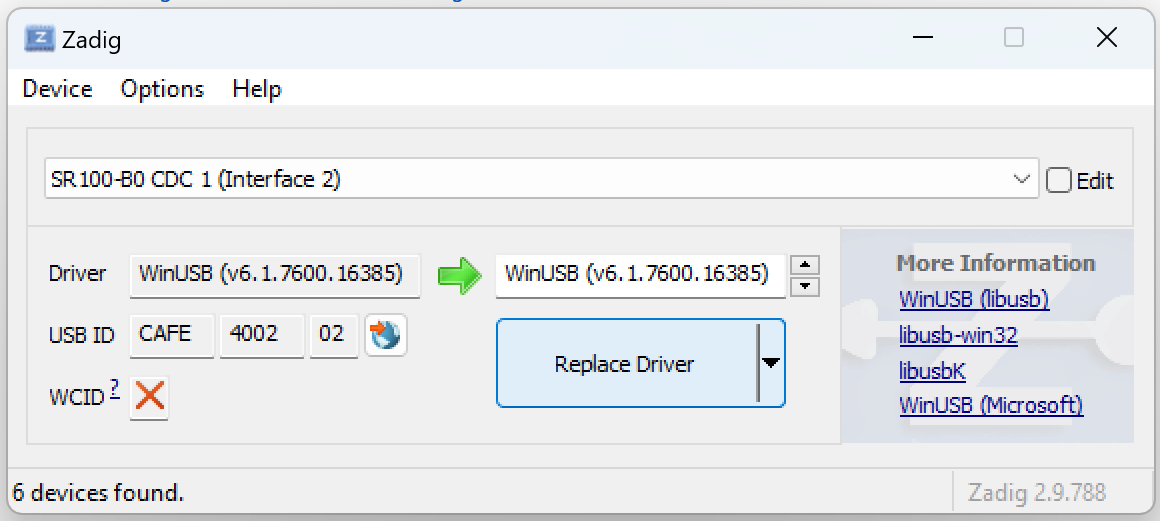
Choose WinUSB as the driver and click Replace Driver.
Reconnect the board and verify streaming in your example.